Luís Marques
Ph.D. candidate @ University of Michigan • 🚀 🪐

I’m a Robotics Ph.D. candidate at the University of Michigan, advised by Dmitry Berenson! My research spans Robotics, Machine Learning and Control Theory, with a primary focus on developing autonomous systems capable of provably safe operation under uncertainty. Downstream applications of my work range from self-driving cars to collaborative robots.
I obtained a M.Eng. in Aeronautical Engineering from Imperial College London in 2023. While there, I collaborated with Panagiotis Angeloudis on developing safe control policies for autonomous vehicles, and with Yiannis Demiris on augmenting the assistive feeding capabilities of bimanual manipulators.
Open to collaborations! Reach me through:
lmarques [at] umich [dot] edu
News
| Dec 13th 2024 | I have passed my qualifying exams and advanced to Ph.D. candidacy! |
|---|---|
| Nov 22nd 2024 | Happy to have been awarded a Rackham International Student Fellowship (university-wide competition) to help cover my tuition costs. |
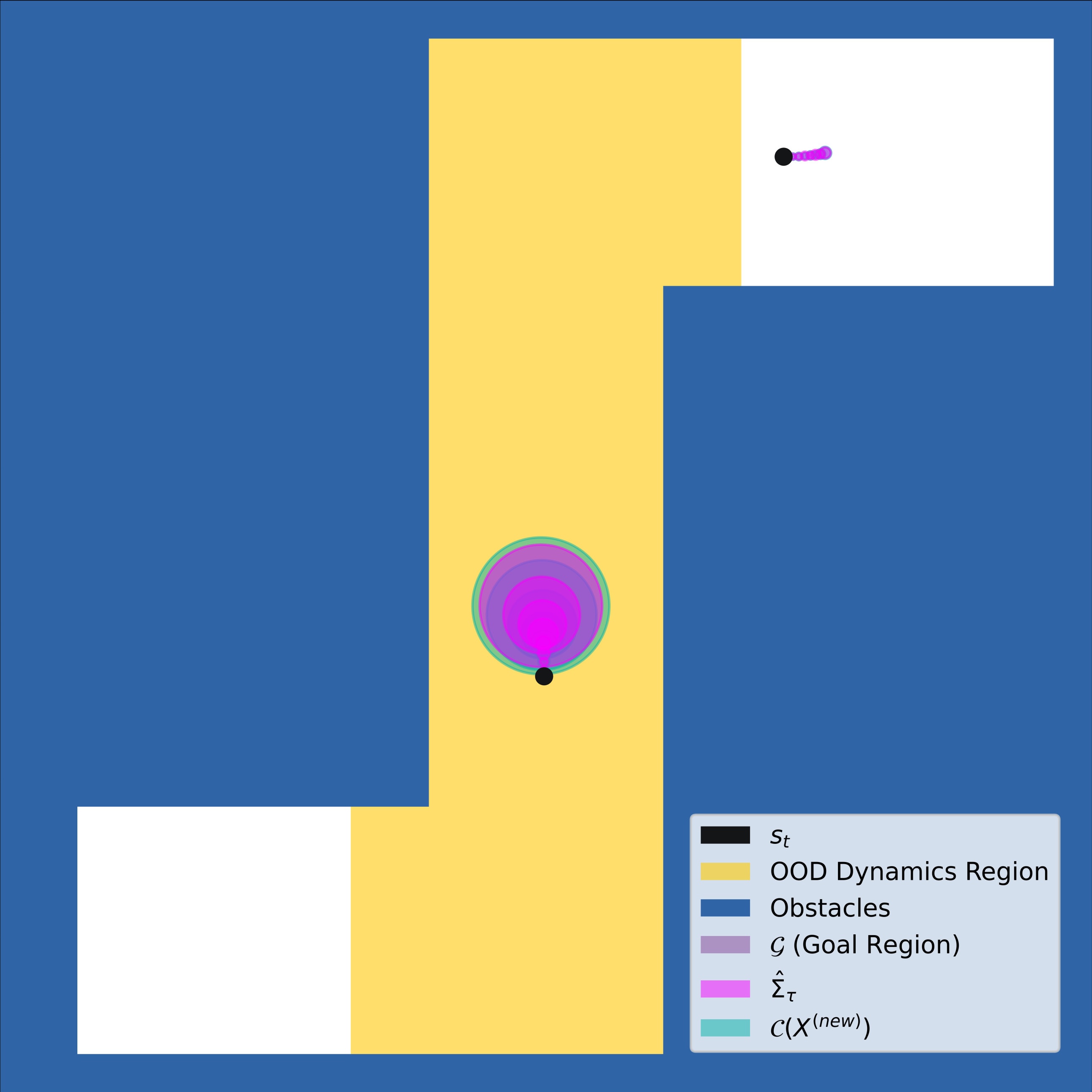
| Oct 15th 2024 | Presented “Quantifying Aleatoric and Epistemic Dynamics Uncertainty via Local Conformal Calibration” at the Michigan AI Symposium! |
| Aug 17th 2024 | “Quantifying Aleatoric and Epistemic Dynamics Uncertainty via Local Conformal Calibration” was accepted to WAFR 2024! |
| Mar 22nd 2024 | Happy to have served as the Graduate Student representative in the University of Michigan’s Information Technology Committee for the 2023-24 academic year! See the final report here 📄. |
| Jan 22nd 2024 | Together with Andrea Sipos, I’m starting as co-chair in Professional Development and Networking for the Robotics Graduate Student Council at the University of Michigan! |
| Aug 28th 2023 | Starting my PhD at ARM Lab in Michigan Robotics 🤖 with Dmitry Berenson! |
| Aug 2nd 2023 | “Safe and Efficient Manoeuvring for Emergency Vehicles in Autonomous Traffic using Multi-Agent Proximal Policy Optimisation” has been accepted to Transportmetrica A. Many congrats to Leandro Parada and Eduardo Candela! |
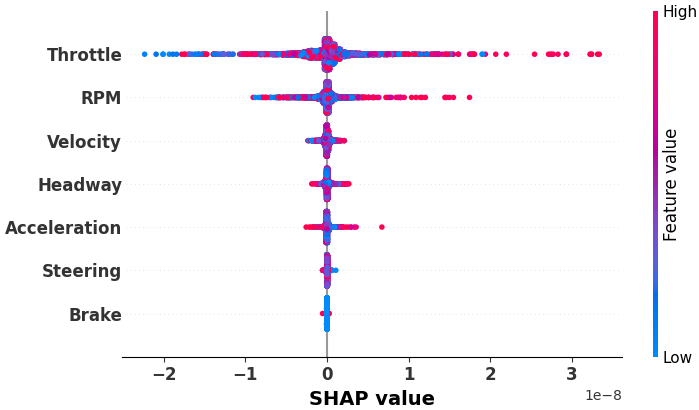
| Jul 13th 2023 | “Driving Style Classification using Deep Temporal Clustering with Enhanced Explainability” has been accepted to ITSC 2023. Many congrats to Yuxiang Feng! |
| Jun 5th 2023 | Submitted my M.Eng. Thesis at Imperial College London on “Robotic Assistive Feeding”! |
| May 29th 2023 | “Probabilistic Planning for Maritime Search and Rescue” was accepted to DOD 2023! |
| Mar 13th 2023 | Took part in a training course by the European Space Agency on Spacecraft Communications @ ESA ESEC (Redu & Galaxia) and ESOC. |
| Oct 10th 2022 | Started my M.Eng. Thesis project at the Aero Department in Imperial College London, in collaboration with EEE. I’m happy to be jointly supervised by Yiannis Demiris and Eric Kerrigan! |
| Sep 23rd 2022 | Finished a 12-week UROP placement at the Personal Robotics Lab on “Sim2Real Motion Planning for Robotic Manipulation”, supervised by Yiannis Demiris! |
| Jun 30th 2022 | “Transferring Multi-Agent Reinforcement Learning Policies for Autonomous Driving using Sim-to-Real” was accepted to IROS 2022! |
| Mar 22nd 2022 | “Transferring Multi-Agent Reinforcement Learning Policies for Autonomous Driving using Sim-to-Real” is now out on arXiv! |